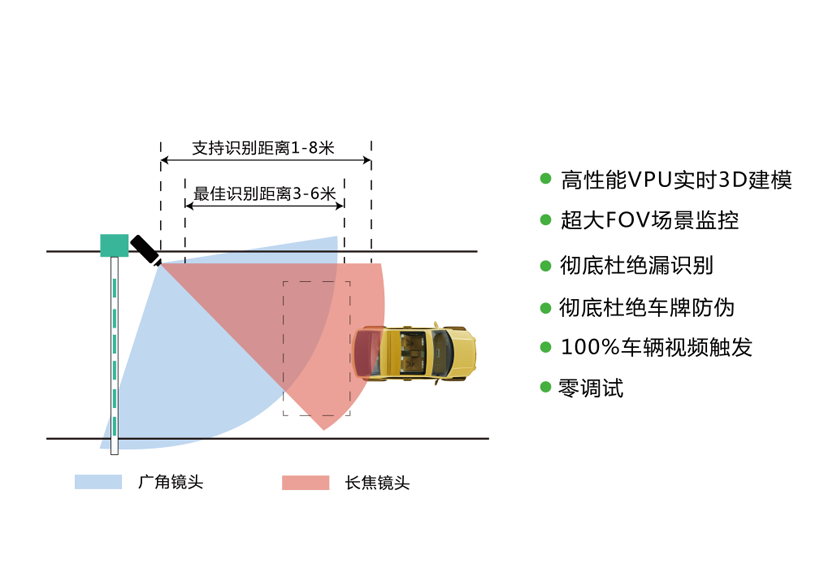

400万像素双镜头立体视觉
基于视差原理,通过计算图像对应点间的位置偏差,构建三维立体模型,还原车辆三维信息。
实时3D建模
内置高性能并行计算VPU(Video Processing Unit 视觉处理器),此计算引擎旨在加速处理3D建模带来的超大计算量,保证3D建模的快速高质量实现。
彻底杜绝漏识别
相机通过车辆3D建模,还原车辆真实尺寸,彻底杜绝无牌车及跟车漏识别。
车牌防伪
智能感知场景中车牌尺寸及空间距离,杜绝相机将图片类车牌或打印车牌错误识别为真实车牌。
零调试
定制化异构双镜头,集宽视角与长景深于一体,覆盖停车场车道所需的多样成像距离,实现零调试。
超大FOV场景监控
150度超大Field of view视场角,除覆盖车道场景同时涵盖道闸等前端设备,为无人值守奠定关键基础。
便捷维护
支持网络远程升级,实现远程维护。
- 公司首页
- 关于隆地
-
产品中心
 全球唯一的不需要中控室的无人值守停车场管理系统 断网断电不影响系统使用
全球唯一的不需要中控室的无人值守停车场管理系统 断网断电不影响系统使用
史上最精简单的系统 免电脑 免主板 免售后 免收费员
史上最赚钱的系统 返佣增加近百倍收入 临停支付比例增长50%
月租支付比例增长100% 物业费支付比例增长100% 商户自主购券比例增长100%
史上最会推销自己的系统 扫码支付 优惠券 精细到项目的广告投放 目标精准 微信直达
隆地智能在一卡通应用领域中实现的产品包含:车辆通道管理系统(网络高清车牌识别系统,出入口车辆收费系统,远距离蓝牙管理系统,车位引导系统,车辆计数系统等),人员通道管理系统(含三辊闸,翼闸,摆闸,工地管理门禁等),人脸识别系统,电梯层控系统,能够满足不同客户的使用要求。
-
解决方案
 停车场管理系统是通过计算机、网络设备、车道管理设备搭建的一套对停车场车辆出入、场内车流引导、收取停车费进行管理的网络系统。是专业车场管理公司必备的工具。它通过采集记录车辆出入记录、场内位置,实现车辆出入和场内车辆的动态和静态的综合管理。
停车场管理系统是通过计算机、网络设备、车道管理设备搭建的一套对停车场车辆出入、场内车流引导、收取停车费进行管理的网络系统。是专业车场管理公司必备的工具。它通过采集记录车辆出入记录、场内位置,实现车辆出入和场内车辆的动态和静态的综合管理。 - 服务支持
-
典型案例
 郑州隆地智能科技有限公司,始终致力于智能建筑一卡通领域最具影响力的企业。以赢得利益相关者和社会广泛尊重作为企业的宗旨。在经营质量、经营规模、盈利能力和市场占有率各方面都成为行业的表率。不断发展和壮大组织,探索企业为全体成员发展服务的新模式
郑州隆地智能科技有限公司,始终致力于智能建筑一卡通领域最具影响力的企业。以赢得利益相关者和社会广泛尊重作为企业的宗旨。在经营质量、经营规模、盈利能力和市场占有率各方面都成为行业的表率。不断发展和壮大组织,探索企业为全体成员发展服务的新模式 -
联系我们

郑州隆地智能科技有限公司
服务电话:189 0385 7056
经理热线:183 3983 5188
地址:郑州市金水区宋砦小区3号院36号楼1单元1楼
网址:http://www.www.londii.com